IIT जोधपुर के शोधकर्ता ने शरीर के निचले अंगों मसलन पैर के दुर्घटना के बाद ठीक से काम करने के लिए रोबोटिक प्रशिक्षकों को डिजाइन किया, संघ यह 2011 की जनगणना के अनुसार देशभर में कुल 5000000 लोग पांव की अपंगता के शिकार




शोधकर्ता ने एक रोबोटिक ट्रेनर तैयार किया है जिसका उपयोग फिजियोथेरेपी में किया जा सकता है


प्रस्तावित प्रशिक्षक अवधारणात्मक रूप से सरल है और इसमें मॉड्यूलर यांत्रिक विन्यास है जिसे ठीक करना और उपयोग करना आसान है

रोबोटिक्स के क्षेत्र में इंजीनियरों की बढ़ती मांग का समर्थन करने के लिए, आईआईटी जोधपुर ने एम.टेक की शुरुआत की है। रोबोटिक्स और मोबिलिटी सिस्टम में कार्यक्रम
वीडियो लिंक:
https://drive.google.com/drive/folders/1iDhFQaYvpalxc9UzzO7XBB2oXBc9I_B4?usp=sharing
जोधपुर, 12-अक्टूबर-2022: भारतीय प्रौद्योगिकी संस्थान जोधपुर के शोधकर्ता, डॉ जयंत कुमार मोहंता, सहायक प्रोफेसर, मैकेनिकल इंजीनियरिंग विभाग के साथ-साथ अन्य सह-शोधकर्ताओं ने रोबोट प्रशिक्षकों को डिज़ाइन किया है जिनका उपयोग निचले अंगों की अक्षमताओं के इलाज के लिए फिजियोथेरेपी में किया जा सकता है। अंग विकलांगता भारतीयों में एक गंभीर बीमारी है, और यह उम्र से संबंधित बीमारियों, शारीरिक विकृतियों, दुर्घटनाओं, स्ट्रोक, पोलियो आदि के कारण होती है। 2011 की जनगणना के अनुसार, भारत में गतिमान विकलांग लोगों की संख्या 50 लाख है।
निचले अंगों का पुनर्वास, विशेष रूप से चाल की वसूली के लिए, समय लगता है और कभी-कभी इसमें कई फिजियोथेरेपिस्ट शामिल होते हैं। हाल ही में, निचले अंगों के पुनर्वास के लिए रोबोटिक उपकरणों को डिजाइन करने में रुचि रही है। रोबोटिक पुनर्वास में, चिकित्सक को केवल पर्यवेक्षण और उपकरण की स्थापना प्रदान करने की आवश्यकता होती है। इस शोध कार्य से प्राप्त समझ को इंटरनेशनल जर्नल ऑफ एडवांस्ड रोबोटिक सिस्टम्स में एक पेपर (https://doi.org/10.1177/17298814221075184) में साझा किया गया है।
अधिकांश मौजूदा रोबोटिक प्रणालियां केवल धनु तल में गति करके रोगियों का इलाज करती हैं – वह काल्पनिक विमान जो शरीर को बाएं और दाएं भागों में विभाजित करता है। पूर्ण अंग गति के लिए, धनु गति पर्याप्त नहीं है और अनुप्रस्थ (ऊपरी और निचले शरीर) और कोरोनल (आगे और पीछे) विमानों में भी गति आवश्यक है। IIT जोधपुर के शोधकर्ता ने एक रोबोट जोड़तोड़ व्यवस्था का प्रस्ताव दिया है जो तीनों विमानों यानी धनु, अनुप्रस्थ और कोरोनल प्लेन में टखने को गति प्रदान करने में सक्षम है।
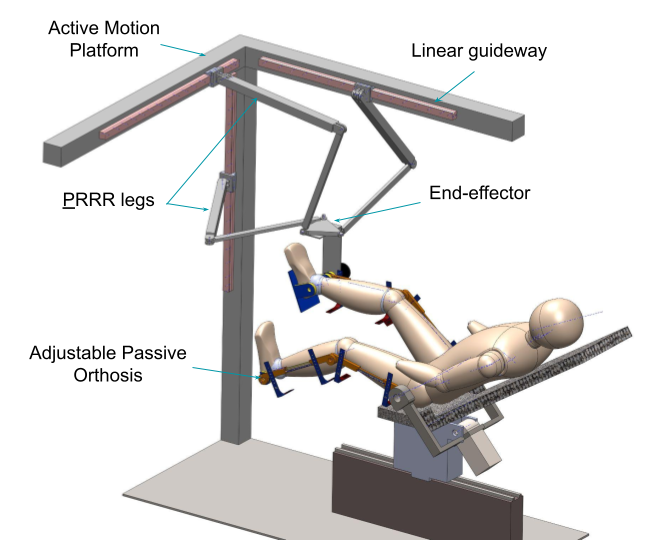
“उपचार के सही क्रम को क्रियान्वित करने पर पूर्ण पुनर्वास संभव है। रोबोट बिना थके इसे करने में सक्षम होंगे। ” डॉ मोहंता, सहायक प्रोफेसर, IIT जोधपुर ने समझाया। रोबोट ट्रेनर एक ब्रेस या पहनने योग्य उपकरण था जैसे कि एक्सोस्केलेटन जो पैर का समर्थन करता है। यह अनुप्रस्थ/क्षैतिज/पार्श्व और धनु/अनुदैर्ध्य तल में आवश्यक अंग चिकित्सीय गतियों को करने के लिए कार्टेशियन (3-दिशात्मक) समानांतर जोड़तोड़ के साथ प्रदान किया गया था। डिजाइन ने गति उपचारों की आवश्यक श्रेणी को निष्पादित करने के लिए एक बड़ा कार्यक्षेत्र सुनिश्चित किया।
डिज़ाइन किए गए स्थिर ट्रेनर की उपयोगिता की पुष्टि कंप्यूटर-आधारित सिमुलेशन के साथ-साथ गति नियंत्रण योजना के साथ-साथ विभिन्न चिकित्सीय रूप से सुझाए गए चिकित्सीय निष्क्रिय गतियों के प्रदर्शन से की गई थी। डिजाइन महत्वपूर्ण आवश्यक पुनर्वास चिकित्सीय आंदोलनों को निष्पादित कर सकता है जैसे अपहरण (शरीर की मध्य रेखा से दूर एक अंग या उपांग की गति), जोड़ (शरीर की मध्य रेखा की ओर एक अंग या उपांग की गति), फ्लेक्सन (झुकने की गति) , और कूल्हे और घुटने के जोड़ों का विस्तार
रिसर्च लीड ने कहा, “हमने जिस रोबोटिक ट्रेनर को डिजाइन किया है, वह लकवाग्रस्त रोगियों को फिजियोथेरेपी प्रदान करने में मदद करेगा, और उन लोगों के लिए जिन्हें रीढ़ की हड्डी में चोट लगी है, जिससे उनके निचले अंगों के कार्य बाधित हो गए हैं।” आईआईटी जोधपुर टीम द्वारा प्रस्तावित ट्रेनर अवधारणात्मक रूप से सरल है और इसमें मॉड्यूलर मैकेनिकल कॉन्फ़िगरेशन है जिसे ठीक करना और उपयोग करना आसान है। इसके अलावा, चूंकि कूल्हे और घुटने की गति के लिए केवल रैखिक एक्ट्यूएटर का उपयोग किया जाता है, इसलिए रोबोट स्वयं स्थिर, सुरक्षित और उपयोग के दौरान मजबूत होता है।
रोबोटिक्स एक अंतःविषय क्षेत्र है जो सॉफ्टवेयर, नियंत्रण, यांत्रिकी, संवेदन और इलेक्ट्रॉनिक्स के डोमेन में कटौती करता है। रोबोटिक और मोबिलिटी सिस्टम के क्षेत्र में विविध पृष्ठभूमि वाले इंजीनियरों की इस बढ़ती मांग को पूरा करने के लिए, और प्रासंगिक अनुसंधान और विकास का समर्थन करने के लिए, आईआईटी जोधपुर द्वारा रोबोटिक्स और मोबिलिटी सिस्टम में एक एमटेक प्रोग्राम तैयार किया गया है। यह कार्यक्रम आईडीआरपी रोबोटिक्स और मोबिलिटी सिस्टम द्वारा पेश किया जाता है।
प्रस्तावित एमटेक कार्यक्रम सबसे चुनौतीपूर्ण उन्नत प्रौद्योगिकी क्षेत्रों में से एक में भाग लेने के लिए अंतःविषय सीखने के अवसर प्रदान करेगा। यह भी परिकल्पना की गई है कि यह कार्यक्रम रोबोटिक्स और मोबिलिटी सिस्टम के डिजाइन, विकास और परीक्षण में नवीन विचारों का परीक्षण करने के लिए एक मंच के रूप में काम करेगा। मैकेनिकल इंजीनियरिंग, इलेक्ट्रिकल इंजीनियरिंग, इलेक्ट्रिकल एंड कम्युनिकेशन इंजीनियरिंग, कंप्यूटर साइंस एंड इंजीनियरिंग, इंस्ट्रुमेंटेशन एंड कंट्रोल, एयरोस्पेस इंजीनियरिंग, ऑटोमोबाइल इंजीनियरिंग, एरोनॉटिकल इंजीनियरिंग, इंजीनियरिंग फिजिक्स या समकक्ष पृष्ठभूमि के छात्र आवेदन करने के लिए पात्र हैं
IIT Jodhpur researcher design robotic trainers for lower limb rehabilitation
Ø The researcher designed a robotic trainer that can be used in physiotherapy
Ø The trainer proposed is conceptually simple and has a modular mechanical configuration that is easy to fix and use
Ø To support the increasing demand of engineers in the field of robotics, IIT Jodhpur has introduced a M.Tech. Programme in Robotics and Mobility System
Video Link:
https://drive.google.com/drive/folders/1iDhFQaYvpalxc9UzzO7XBB2oXBc9I_B4?usp=sharing
JODHPUR, 12-October-2022: The Indian Institute of Technology Jodhpur researcher, Dr Jayant Kumar Mohanta, Assistant Professor, Department of Mechanical Engineering along with other co-researchers has designed robotic trainers that can be used in physiotherapy to treat lower limb disabilities. Limb disability is a serious malady among Indians, and is caused by age-related ailments, physical deformations, accidents, strokes, polio, etc. According to Census 2011, there are five million people with locomotor disabilities in India.
Lower limb rehabilitation, especially for gait recovery, is time consuming and sometimes involves multiple physiotherapists. Recently, there has been interest in designing robotic devices for lower limb rehabilitation. In robotic rehabilitation, the therapist only needs to provide supervision and the setting up of the device. The understanding gleaned from this research work has been shared in a paper (https://doi.org/10.1177/17298814221075184) in the International Journal of Advanced Robotic Systems.
Most existing robotic systems treat the patients by performing motions only in the sagittal plane – the imaginary plane that divides the body into the left and right parts. For complete limb movement, sagittal movement is not sufficient and movements in transverse (upper and lower body) and coronal (front and back) planes are also essential. The IIT Jodhpur researcher has proposed a robot manipulator arrangement that is capable of providing motion to the ankle in all three planes i.e., sagittal, transverse and coronal plane.
“Complete Rehabilitation is possible if the correct sequence of therapies is executed. Robots will be able to do it without getting tired.”, explained Dr Mohanta, Assistant Professor, IIT Jodhpur. The robotic trainer was a brace or a wearable device like an exoskeleton that supports the leg. It was provided with a Cartesian (3-directional) parallel manipulator to perform the required limb therapeutic motions in the transverse/horizontal/lateral and sagittal/longitudinal plane. The design ensured a large workspace to execute the required range of motion therapies.
The usefulness of the designed stationary trainer was confirmed using computer-based simulations along with a motion control scheme by performing various clinically suggested therapeutic passive range of motions. The design could execute important essential rehabilitation therapeutic movements like abduction (the motion of a limb or appendage away from the midline of the body), adduction (the motion of a limb or appendage towards the midline of the body), flexion (bending movement), and extension of the hip and knee joints
“The robotic trainer we have designed will help provide physiotherapy to paralytic patients, and for those who have spinal cord injuries that have disrupted their lower limb functions”, said the research lead. The trainer proposed by the IIT Jodhpur team is conceptually simple and has a modular mechanical configuration that is easy to fix and use. Furthermore, since only linear actuators are used for the hip and knee motions, the robot itself is stable, safe and robust during use.
Robotics is an interdisciplinary field that cuts across domains of software, control, mechanics, sensing and electronics. In order to meet this increasing demand for engineers with diverse backgrounds in the field of robotic and mobility systems, and to support relevant research and development, an MTech Programme in Robotics and Mobility System is designed by IIT Jodhpur. This program is offered by IDRP Robotics and Mobility Systems.
The proposed MTech programme will provide interdisciplinary learning opportunities to participate in one of the most challenging advanced technology areas. It is also envisaged that this programme will serve as a platform to test innovative ideas in the design, development, and testing of the Robotics and Mobility systems. Students from Mechanical Engineering, Electrical Engineering, Electrical and Communication Engineering, Computer Science and Engineering, Instrumentation and Control, Aerospace Engineering, Automobile Engineering, Aeronautical Engineering, Engineering Physics or Equivalent background are eligible to apply.